Содержание
Осевая симметрия
Определение
Осевой симметрией относительно прямой $l$ называется такое преобразование плоскости, при котором точки прямой $l$ остаются неподвижными, а для любой точки $A$ не лежащей на прямой $l$ будет выполнено: $AA'\perp l$, $\rho(A; l)=\rho(A';l)$, где $A'$ – это образ точки $A$.
Осевая симметрия в координатах
- Образ точки $X(x_0;y_0)$ при осевой симметрии относительно прямой $l_1: y=a$ имеет координаты $X'(x_0;2a-y_0)$;
- Образ точки $X(x_0;y_0)$ при осевой симметрии относительно прямой $l_2: x=b$ имеет координаты $X'(2b-x_0;y_0)$;
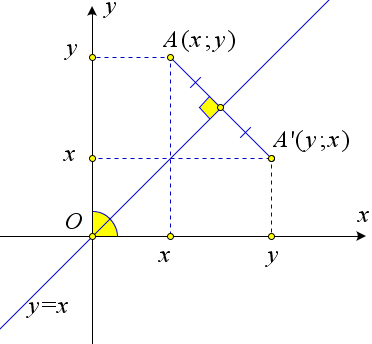
- Образ точки $X(x_0;y_0)$ при осевой симметрии относительно прямой $l_3: x=y$ имеет координаты $X'(y_0;x_0)$.
- Образ точки $X(x_0;y_0)$ при осевой симметрии относительно прямой $l_4: ax+by+c=0$ имеет координаты $X'\left(\dfrac{(b^2-a^2)x_0-2aby_0-2ac}{a^2+b^2};\dfrac{(a^2-b^2)y_0-2abx_0-2bc}{a^2+b^2}\right)$.
Доказательство
Докажем первый пункт теоремы
Пусть $X'=S_{l_1}(X)$.
Обозначим координаты точки $X'(x';y')$.
Очевидно, что $y'=y$.
Рассмотрим различные случаи расположения точки $X$ относительно прямой $l_1$.
Пусть $x_0>b$.
Тогда $x'=b-AX=b-(x_0-b)=2b-x_0$.
Если $x_0=b$, то $x'=x_0=2b-x_0$, то есть соотношение остаётся верным.
Если же $x_0<b$, то $x'=b+AX=b+(b-x_0)=2b-x_0$.
Докажем второй пункт теоремы
Пусть $X'=S_{l_2}(X)$.
Обозначим координаты точки $X'(x';y')$.
Очевидно, что $x'=x$.
Рассмотрим различные случаи расположения точки $X$ относительно прямой $l_2$.
Пусть $y_0>a$.
Тогда $y'=a-AX=a-(y_0-a)=2a-y_0$.
Если $y_0=a$, то $y'=y_0=2a-y_0$, то есть соотношение остаётся верным.
Если же $y_0<a$, то $y'=a+AX=a+(a-y_0)=2a-y_0$.
Докажем третий пункт теоремы
Прямая $l_3$ образует равные углы с осями координат.
А так как движение сохраняет углы, а точка $O$ остаётся неподвижной при осевой симметрии относительно прямой $l_3$, то образом оси абсцисс при осевой симметрии $S_{l_3}$ является ось ординат, и наоборот.
Следовательно, координаты точки при осевой симметрии $S_{l_3}$ меняются местами, то есть образом точки $X(x;y)$ будет являться точка $X'(y;x)$.
Теорема
Осевая симметрия является движением..
Доказательство
Рассмотрим осевую симметрию $S_{l}$.
Докажем, что $S_{l}$ – это движение.
Введем систему координат таким образом, чтобы прямая $l$ совпадала с осью абсцисс.
Возьмём любые две точки $A(x_1, y_1)$ и $B(x_2,y_2)$ и рассмотрим симметричные им относительно оси $x$ точки $A'(x_1, -y_1)$ и $B'(x_2,-y_2)$.
По формуле расстояния между двумя точками
$$A'B'=\sqrt{(x_2-x_1)^2+(-y_2+y_1)^2}=\sqrt{(x_2-x_1)^2+(y_2-y_1)^2}=AB.$$
Таким образом, осевая симметрия сохраняет расстояния, то есть является движением.
Теорема
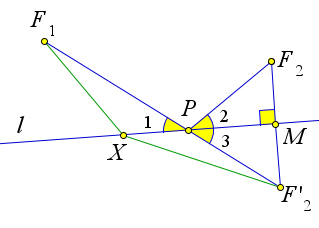
Пусть точки $F_1$ и $F_2$ лежат по одну сторону от прямой $l$. Сумма расстояний $F_1P+PF_2$, где точка $P$ лежит на прямой будет наименьшей, если лучи $PF_1$ и $PF_2$ образуют равные углы с прямой $l$.
Доказательство
Пусть $F'_2=S_{l}(F_2)$.
Пусть прямая $F_1F'_2$ пересекает прямую $l$ в точке $P$.
Тогда, так как $PF_2=PF'_2$, то $F_1P+PF_2=F_1P+PF'_2$.
Для любой точки $X$ прямой $l$, отличной от точки $P$, с учётом неравенства треугольника будет верно $F_1X+XF'_2=F_1X+XF'_2>F_1F'_2=F_1F_2$.
Таким образом сумма $F_1P+PF_2$ будет наименьшей.
Докажем теперь, что $\angle 1=\angle 2$.
Действительно, треугольник $F_2PF'_2$ равнобедренный, и, следовательно, высота $PM$ является биссектрисой.
Тогда $\angle 2=\angle 3$. Но $\angle 1=\angle 3$, как вертикальные. Следовательно, $\angle 1=\angle 2$.